この数十年、シリアル通信は多くの工場アプリケーションで信頼性の高い接続性を提供してきました。最近ではイーサネット通信がより一般的になっていますが、多種多様なレガシー機器が依然としてシリアル通信に依存しています。OT/ITコンバージェンスが運用効率を最適化することを認識している工場の管理者が増えていますが、古いシステムと新しいシステムを統合するという課題に最前線で直面するのは、現場のエンジニアやシステムインテグレーターです。幸いにも、シリアルデバイスサーバーなどのソリューションが、シリアルデバイスと最新のイーサネットをベースとしたシステムとの間にあるギャップを埋めています。しかし、シリアル通信とイーサネット通信は2つの異なるデータ伝送方法を採用しているため、シリアルからイーサネットベースのネットワークに移行する場合、TCP/IPネットワークの安定性や読み出し/書き込みパフォーマンスに懸念が生じる可能性があります。
MoxaのNPortシリアルデバイスサーバーには、Real COMドライバーが付属しており、これによりホストコンピューターに仮想COMポートが作成され、ネットワーク上のIPポートがマッピングされて、エッジのシリアルデバイスがシリアルケーブルで物理的に接続されているかのようにホストコンピューターと通信できるようになります。これによってシリアルソフトウェアアプリケーションが変更されることはありません。さらに、Real COMドライバーは高度で豊富なファンクションセットを提供しており、仮想シリアルポートが可能な限りネイティブシリアルポートに近いパフォーマンスを発揮します。
本稿では、CNCマシンと無人搬送車(AGV)の監視という、工場で一般的に見られる2つのアプリケーションについて、このReal COMドライバーを使用することでシリアルツーイーサネット通信の課題を容易に克服する方法を説明します。
シナリオ1:CNCマシンの監視
従来のCNCマシンは通常、RS-232通信を使用します。CNCマシンの生産性を最適化するには、リアルタイムデータを取得することが重要です。これにより、ダウンタイムを短縮したり、製造プログラムをタイムリーに切り替えたりするための迅速な措置を講じることが可能になります。したがって、遠隔監視アプリケーションがコントロールセンターからCNCマシンを制御および監視できるようにする必要があります。これを実現するために、シリアルデバイスサーバーを使用してシリアルベースのCNCマシンとコントロールセンターのイーサネットをベースとしたシステム間の通信をブリッジします。ただし、異なる通信方式間のデータ伝送は、ネットワークの信頼性に関する不確実性をもたらします。さらに、イーサネットネットワークを介してシリアルデータを変換すると、データ送受信のパフォーマンスに影響を与える可能性があります。
NPortによって可能になること
ネットワークの自動再接続で接続を維持
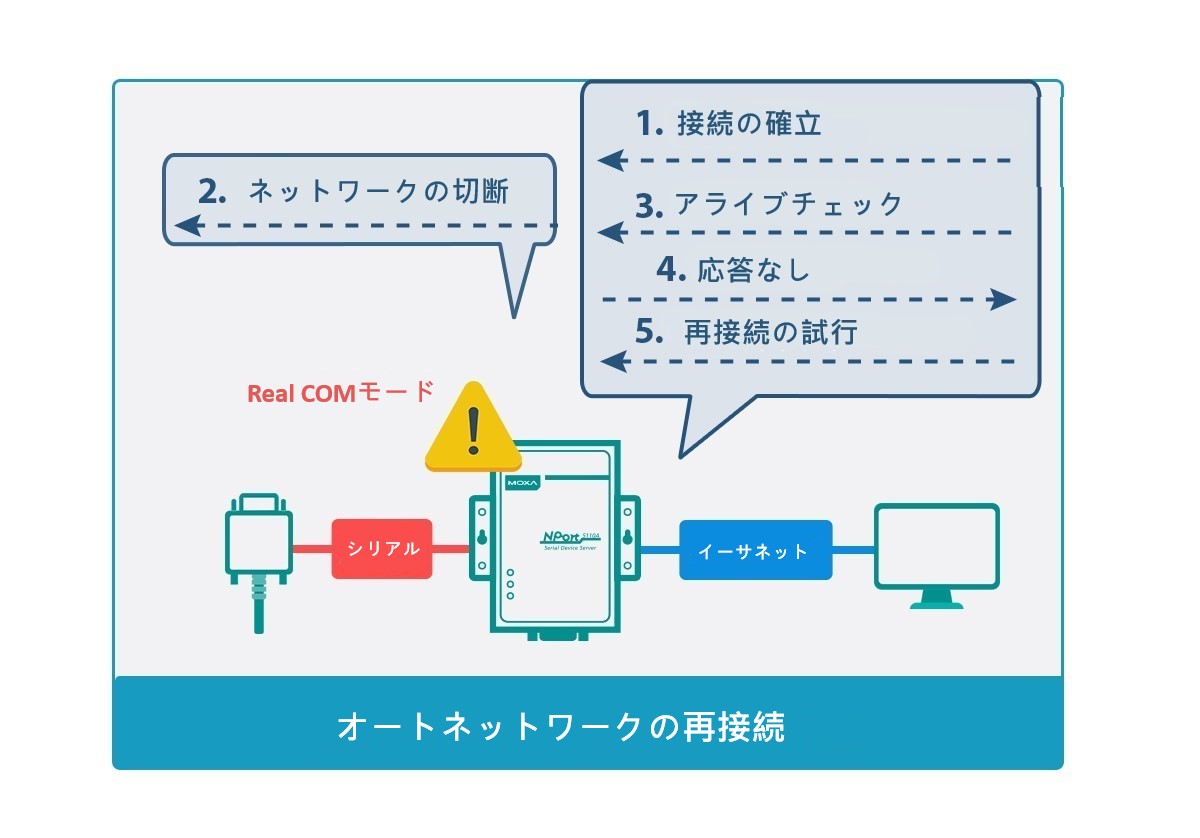
Real COMドライバーに組み込まれた高度なネットワーク自動再接続機能により、CNCマシンはイーサネットベースのシステムとの接続が維持されます。TCP接続が切断され、NPortシリアルデバイスサーバーがアライブチェック(Alive Check)パケットに応答しない場合、Real COMドライバーはTCP接続の再確立を繰り返し試行するため、ポートを閉じてソフトウェアを再度開いて再接続する必要はありません。
NPortによって可能になること
TxモードとFast Flushによる伝送パフォーマンスの向上
可能な限りネイティブCOMポートに近い動作パフォーマンスを実現するために、Real COMドライバーは、CNCマシン監視アプリケーションの伝送パフォーマンスを向上させる機能を提供しています。まず、Txモード機能にはハイパフォーマンスモードが備わっており、データが送信されるとNPortドライバーがアプリケーションプログラムに通知できるようになります。これにより、NPortドライバーがNPortから確認を受信した場合にのみアプリケーションプログラムに通知する従来のモードと比較して、伝送パフォーマンスを強化し、スループットを向上させることができます。
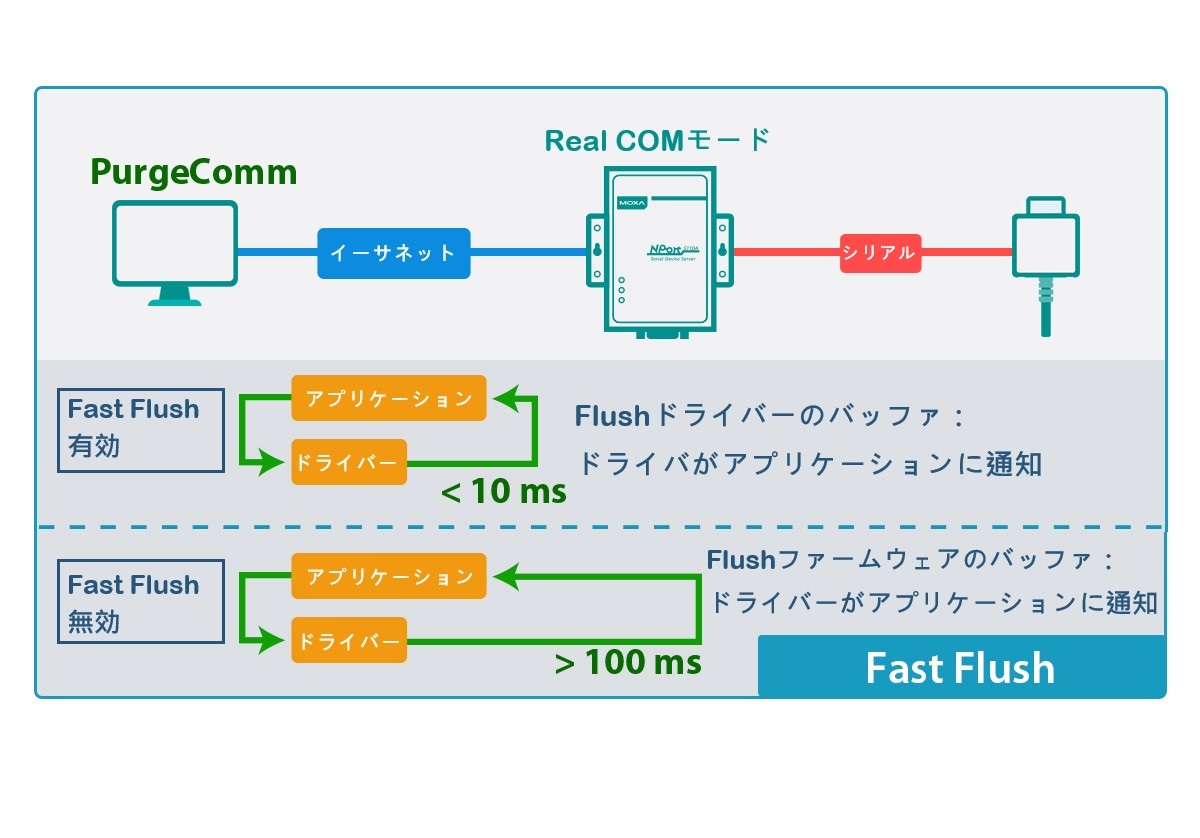
Fast Flushは、特にWindows OS向けに設計された機能です。一部のアプリケーションでは、ユーザーのプログラムは、データの読み取りまたは書き込みの前にWin32 PurgeComm()関数を使用します。プログラムがこのPurgeComm()関数を使用している場合、NPortドライバーはローカルバッファをフラッシュする前に、NPortファームウェアバッファにデータがキューイングされていないことを確認するため、NPortファームウェアにクエリを送り続けます。これにより、応答時間は長くなります。迅速な応答時間を必要とするアプリケーションに対応するために、MoxaのFast Flush機能は、NPortファームウェアに問い合わせることなくローカルバッファを直接フラッシュすることで、伝送パフォーマンスを向上させます。
シナリオ2:AGVの監視
AGVは、製造工場や倉庫での荷物の持ち上げおよび輸送タスクを自動化するため、効率が向上し、人件費が削減されます。通常、磁気テープがAGVを経路に沿ってガイドし、AGVは内蔵されたガイドセンサー(RFIDなど)でその経路をたどります。アプリケーションソフトウェアは、応答が受信されるまで50ミリ秒ごとに現在の位置を確認するために、常にAGVに位置リクエストを送信します。場所が特定されると、ソフトウェアはタスクコマンドを送信します。多くのアプリケーションプログラムでは、データの送受信に特定のタイムアウト制限が設けられています。AGVのコントローラーが時間内に位置リクエストに応答できない場合、アプリケーションは連続してリクエストを送信し続けるため、全体の通信効率は低下します。
NPortによって可能になること
データ圧縮と強制送信による送信時間の制御
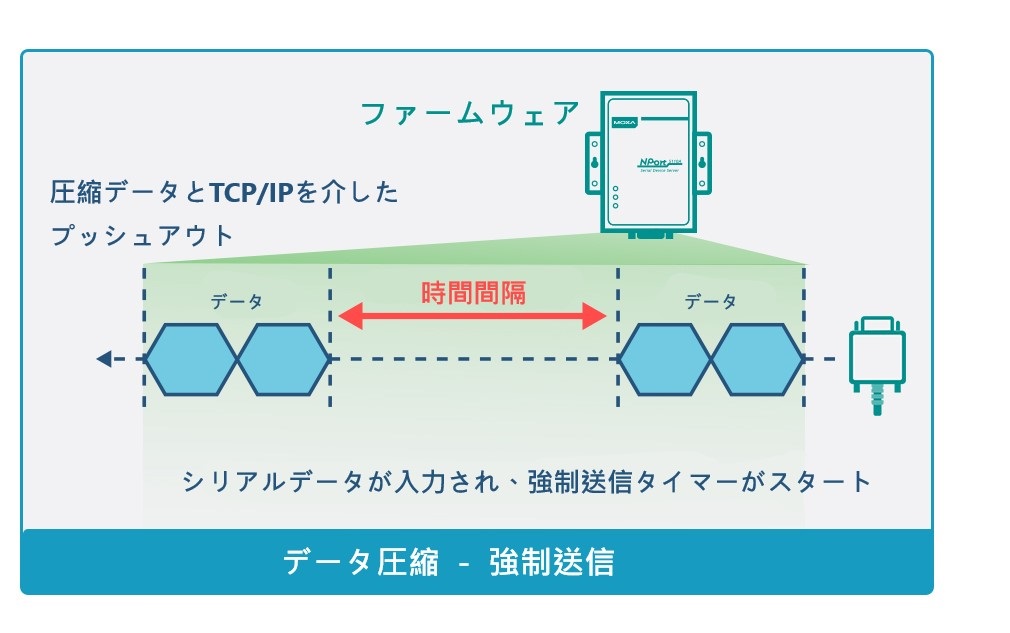
MoxaのNPort Real COMドライバーは、データ圧縮機能をサポートしています。この機能はシリアルデータをいつ、どのように送信用に圧縮する必要があるかを決定することで、AGV操作でのスムーズな通信を確保するものです。パケット長を指定するか、特定文字が検出されたときに、シリアルデータを圧縮できます。データパケットにルールが設定されていない場合、または不完全なデータパケットを送信したい場合、強制送信機能を使用すると、完全なシリアルデータストリームを待つ最大時間間隔を事前に設定できます。この機能を定義するのは文字間のインターバルタイムアウトであり、指定した時間の中でファームウェアがシリアルデータを同じデータフレームに圧縮するように強制します。この機能を有効にすると、NPortシリアルデバイスサーバーは、内部バッファがいっぱいになるか、文字間のインターバルがタイムアウトした場合にのみ、バッファに保存されたデータをTCP/IP経由で転送します。
MoxaのNPortシリアルデバイスサーバーは、各種動作モードにさまざまな機能を提供し、産業用アプリケーションにおける要求に応えます。他の機能について詳しく知るには、Moxaのガイドをダウンロードしてください。さらに、MoxaのNPortシリアルデバイスサーバーはセキュリティ機能を備えさまざまなOSドライバーに対応しているため、シリアルデバイスを最新のシステムに簡単かつ安全に接続できます。詳細については、Moxaのウェブサイトをご覧ください。